Robots
CommU (Communication Unity)

These are social conversation robots designed to enhance the sense of communication by exhibiting conversations between multiple robots to human observers. They are capable of diverse gaze distribution using eye, neck, and waist movements as well as blinking using eyebrows. They are utilized in real-world experiments, including dialogue services in commercial facilities and active listening in psychiatric institutions.
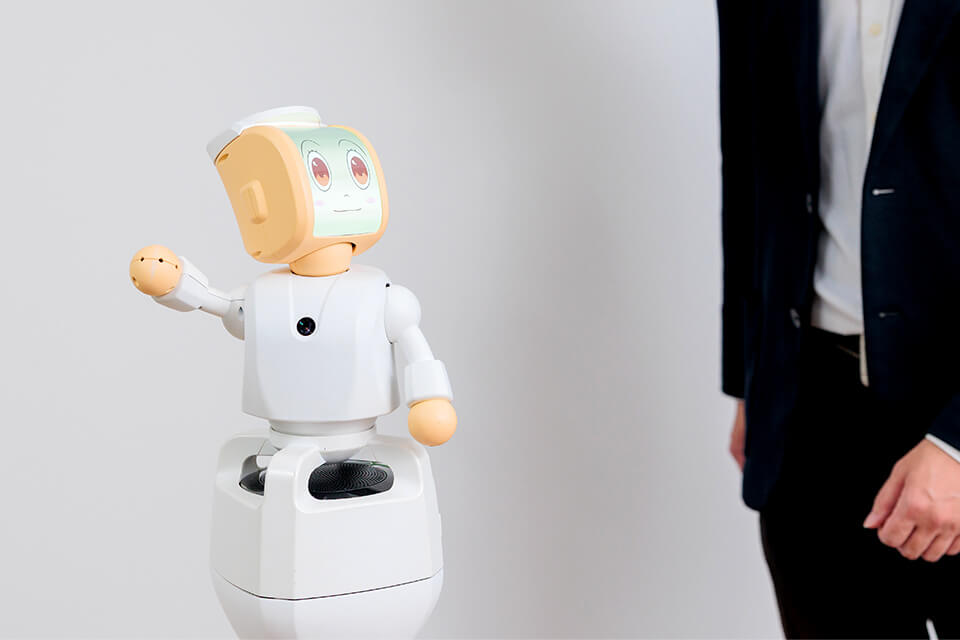
Teleco

A humanoid robot based on CommU, featuring a head composed of an OLED display. It can express a wide range of facial expressions and characters. It is used in various real-world experiments, such as dialogue services in commercial facilities and active listening in psychiatric institutions.
移動CommU/移動Teleco
A mobile dialogue robot equipped with mobility functions for CommU and Teleco. It features an independently driven two-wheel movement mechanism and an up-and-down motion system that allows the upper body to oscillate. It is used for research on interactive mobility within commercial facilities and indoor environments.
CG-CommU (CommU-Talk)

A virtual 3D character with the same appearance as CommU, capable of performing identical body movements. It is utilized for research on communication in virtual spaces and for studies that compare it with physical CommU to explore the significance of robots having a physical presence.
Sota

A social dialogue robot developed alongside CommU. While having a similar structure to CommU, it is designed with fewer degrees of freedom, making it more cost-effective for production and widely applicable in various real-world settings.
HSR

This is a home assistance robot developed to help people live independently at home. It achieves various functions through its compact size and adjustable arm. It is being used for research on remote-controlled robots and autonomous systems utilizing imitation learning.
Spot

It is capable of nimble, highly flexible movements through quadrupedal locomotion. Utilizing its excellent traversability, it achieves autonomous activity in outdoor and unstable environments. It is being used for research on object manipulation and human interaction using the arm on its back.
G1
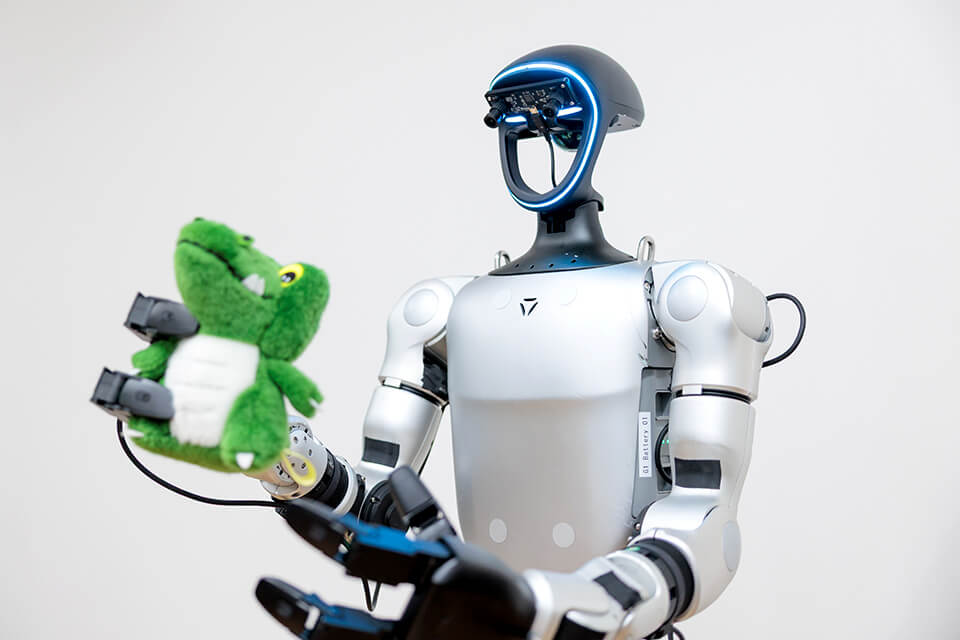
This is a humanoid robot that is expected to be useful in various situations by utilizing a body structure similar to humans. By leveraging its high mobility capabilities, it enables collaborative work with us while also being used for research on the emergence of communication through interaction.
Bonobo

This is a teen-sized research humanoid robot standing 120cm tall. It features a lightweight design of approximately 20kg and inherently safe design using motors of less than 80W. Utilizing the depth camera in its head and expandable audio functions, it is being used for research on service robots, safe collaborative work with humans, and the emergence of natural communication.
Muriqui

It is a small humanoid, approximately 50cm tall. Its design emphasizes durability and resistance to damage. As a small bipedal robot, it is being utilized for research in generative AI and machine learning.
PiPER

This is a small and lightweight 6-degree-of-freedom robot arm. By connecting two PiPERs, imitation learning data can be easily collected through leader and follower control. It is being used for research on object grasping in complex environments and imitation learning through generative models.
UR3 and UR5
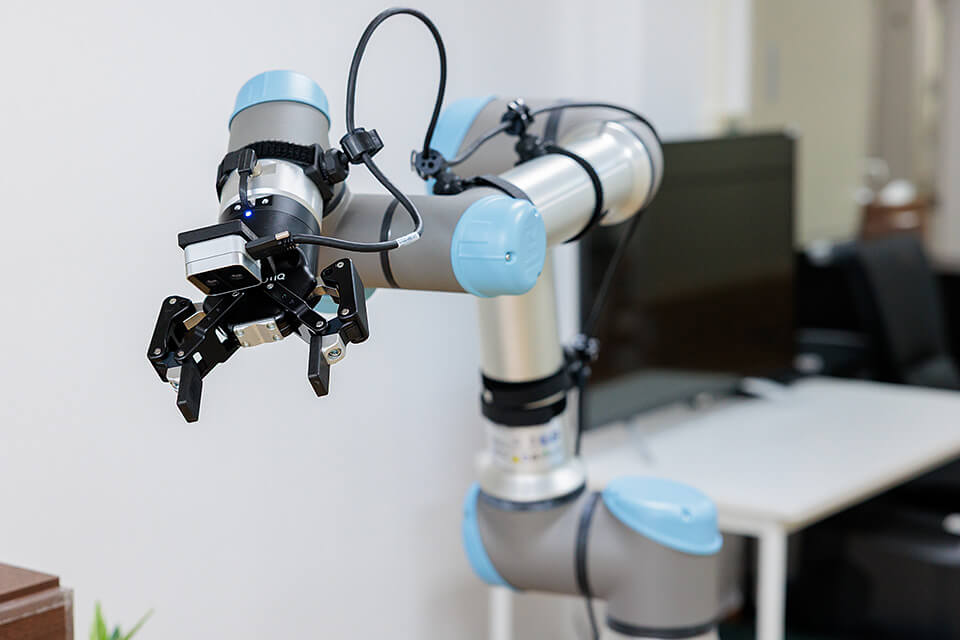
This is a collaborative robot arm that is larger than PiPER and capable of manipulating heavier objects. By utilizing information from the end-effector camera and remote operation data, it is being used for research to achieve collaborative work between multiple robots.
ChiCaRo

This is a remote co-parenting robot that allows parents to interact with their children even from a distance. We are working on research to promote child development through play and to automate remote operation.
Kachaka

This is an autonomous mobile robot that enables object transportation and communication with humans by connecting with various shelves. It is being used for research on multi-robot cooperation to achieve household chores in collaboration with other robots in home environments.